GNASモーションセンサの使用用途
船舶の動揺計測
- 船舶にGNAS モーションセンサを取り付けることで、船体のローリング、ピッチング、ヨーイングを計測することが簡単に出来ます。
- GPS 位置情報や速度情報と連動しているので、どの位置で、どれくらいの速度での動揺かをひもづけて計測することができます。
- 3軸加速度センサを搭載しており、ヒービングやスウェイング、サージングの特徴を計測することができます。(※水平方向の動きの絶対量を直接計測することはできません。)
- GNAS モーションセンサの出力データを記録することで、船の動きを長期間記録することができます。
トラブル発生時の船の挙動を後から解析することができます。 - 長期間測定することで、揺れの周期を測定できます。
挙動簡易図
ローリング
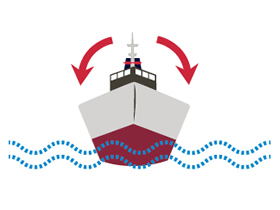 船が左右に傾くように揺れる
船が左右に傾くように揺れる
ピッチング
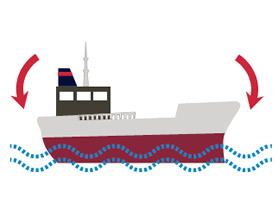 船が前後に傾くように揺れる
船が前後に傾くように揺れる
ヨーイング
 船が左右に振れるように揺れる
船が左右に振れるように揺れる
ヒービング
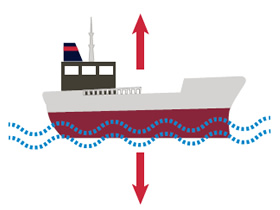 船全体が上下に移動するように揺れる
船全体が上下に移動するように揺れる
スウェイング
 船全体が左右に移動するように揺れる
船全体が左右に移動するように揺れる
サージング
 船全体が前後に移動するように揺れる
船全体が前後に移動するように揺れる
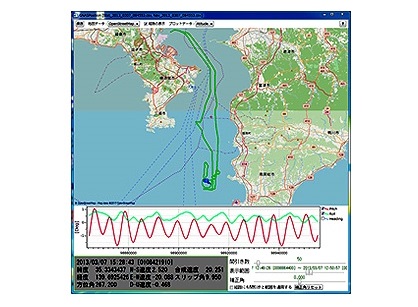
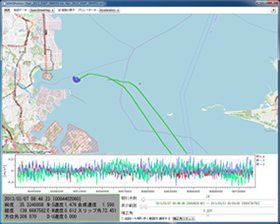
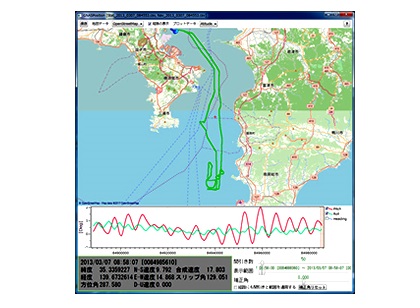
船舶での実例
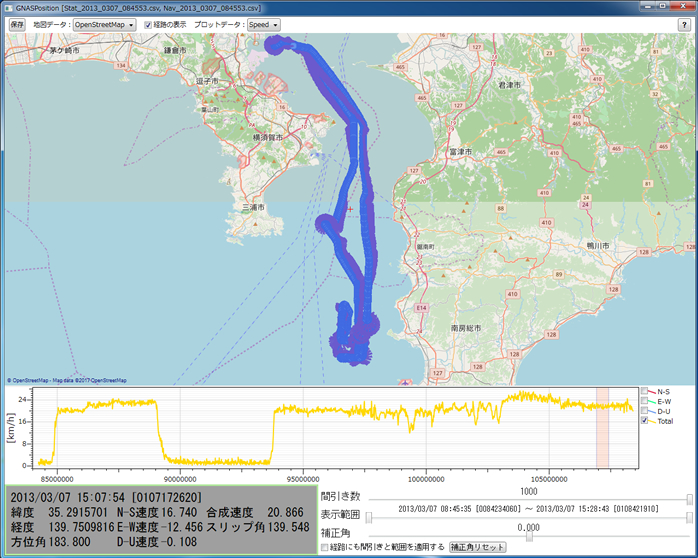
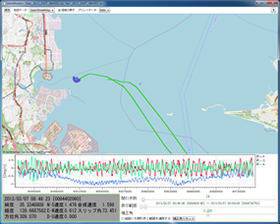
- 航行中の位置情報を計測できますので、航行軌跡地図上にプロットすることができます。
- 計測した動揺データは位置情報に同期していますので、どの場所でどれくらい揺れているかを計測することができます。
停泊時の船舶挙動
加速度
 停泊時のエンジン振動や波に揺られた際に船体へ加わる振動や衝撃などを計測できます。
停泊時のエンジン振動や波に揺られた際に船体へ加わる振動や衝撃などを計測できます。
停泊していても微小な前後左右上下から加速度が加
わっていることを示しています。
角速度
 波によるローリング、ピッチング運動で生じる回転速度を計測できます。波の周期が角速度として表れていることがわかります。
波によるローリング、ピッチング運動で生じる回転速度を計測できます。波の周期が角速度として表れていることがわかります。
姿勢角
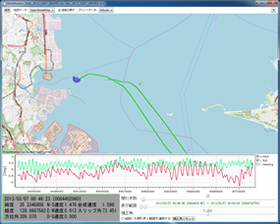 船体の傾きを計測できます。角速度と同じく、波の周期に連動して船体が規則的に前後左右に傾いていることがわかります。
船体の傾きを計測できます。角速度と同じく、波の周期に連動して船体が規則的に前後左右に傾いていることがわかります。
航行時( 左旋回) の船舶の挙動
加速度
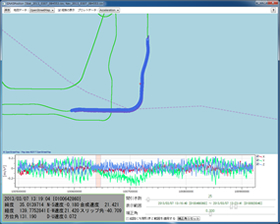 左右に比較的大きな加速度が加わっていることがわかります。また、旋回中は船体左方向に遠心力が加わり、旋回終了後に再び元の動きに戻っていることがわかります。
左右に比較的大きな加速度が加わっていることがわかります。また、旋回中は船体左方向に遠心力が加わり、旋回終了後に再び元の動きに戻っていることがわかります。
角速度
 左右に揺れながら航行し、旋回中は前後左右ともにあまり揺れがなく一定の回転速度で旋回し、旋回後に再び左右に揺れていることがわかります。
左右に揺れながら航行し、旋回中は前後左右ともにあまり揺れがなく一定の回転速度で旋回し、旋回後に再び左右に揺れていることがわかります。
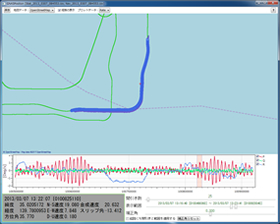
姿勢角
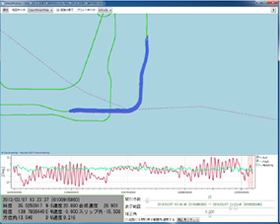 前後方向の傾きはほとんどなく水平に航行していますが、一定周期で左右に揺れていることがわかります。 旋回中には左右の傾きが軽減しており、旋回後に再び左右に傾きながら航行しています。
前後方向の傾きはほとんどなく水平に航行していますが、一定周期で左右に揺れていることがわかります。 旋回中には左右の傾きが軽減しており、旋回後に再び左右に傾きながら航行しています。
波の周期の違い
湾内
沖合