慣性センサ
三次元の移動体に必要なセンサです
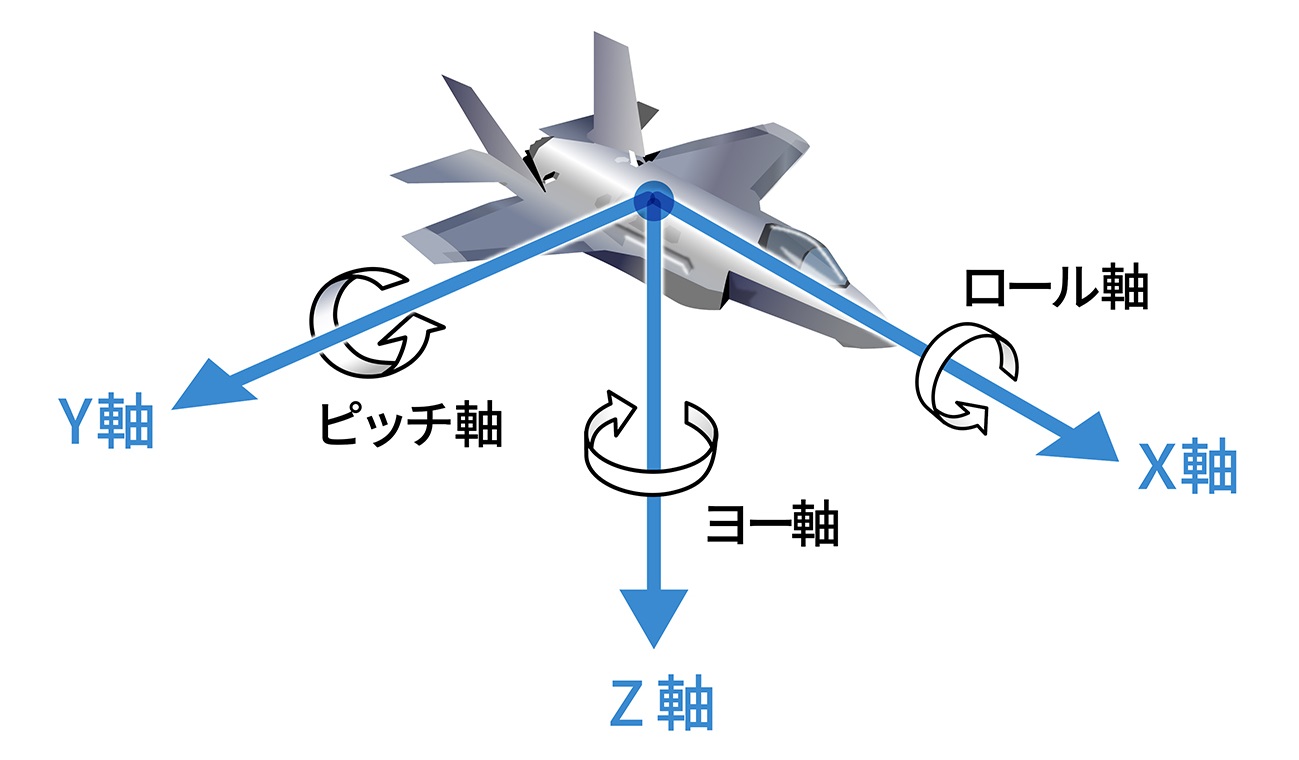
※ 機体の座標軸
航空機や船舶、潜水艇など三次元で動く移動体は、自機の姿勢、速度、位置などを知る必要があります。そのためには、機体の3軸まわり(ロール軸、ピッチ軸、ヨー軸)の角速度と3軸方向(X軸:前後、Y軸:左右、Z軸:上下)の加速度を計測する慣性センサ(IMU: Inertial Measurement Unit)が用いられます。
慣性センサは、機体の座標軸(※)に対応してジャイロセンサと加速度センサを3個ずつ内蔵しており、自機の角速度と加速度を計測します。
この計測データを用いて、コンピュータがリアルタイムで姿勢・方位、速度、位置などを計算します。
加速度センサで計測した各軸の加速度を、ジャイロセンサで計測した各軸の角速度から計算した姿勢・方位角により座標変換した後に積分していくことにより、自機の速度と位置を算出することができるのです。
このように、機体に取り付けた慣性センサの計測データを用いる計算によって姿勢や位置などを求めるナビゲーション(航法)の方法を、ストラップダウン方式と呼びます。
算出された航法データは一般に、航空機の自動操縦装置(オート・パイロット)に送られて到着予定地点までのナビゲーションに用いられたり、コックピットのディスプレイに表示されたりします。
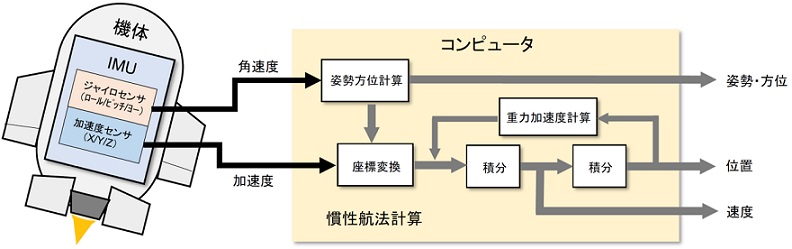
ストラップダウン方式による慣性航法
光学式ジャイロは、地球の自転する角速度(1日で1回転:約15度/時)よりも小さな角速度を計測することが可能です。中でもFOGは、設計の自由度が高く、必要な精度や用途に応じた幅広い性能範囲をカバーできる利点があります。
特に航空機や船舶などの慣性航法には高い計測精度が必要で、ジャイロセンサの出力には、地球の公転(1年で1回転:約0.04度/時)よりも高いバイアス安定性と、高いスケールファクタ安定性が求められます。
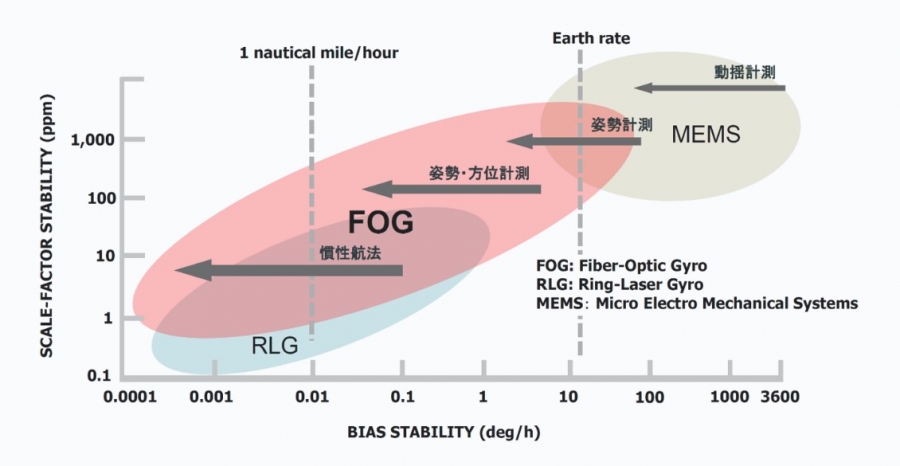
各種ジャイロセンサの実現精度と適用領域
縦軸は小さいほどスケールファクタ安定性が高く、横軸は小さいほどバイアス安定性が高い。
光ファイバ・ジャイロ
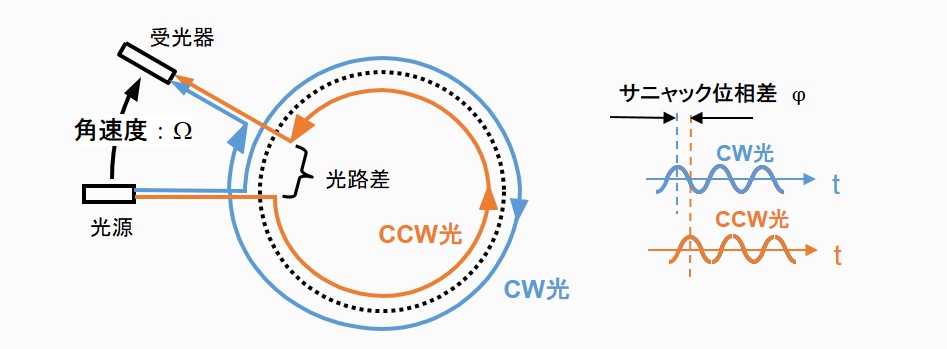
FOGの原理図(サニャック効果)
相対性理論に基づくサニャック効果と呼ばれる原理を用いた光ファイバ・ジャイロ(FOG)は、光ファイバを巻いたコイルの中を時計回りに回る光(CW光)と反時計回りに回る光(CCW光)の位相差を検出することにより、コイルの中心軸まわりの角速度を検出します。
角速度(Ω)が入力されると発生するサニャック位相差(Φ)は下式のように表されます。これを検出することにより、FOGは角速度を計測します。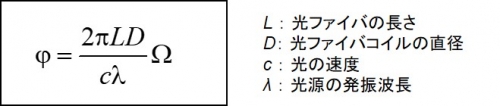
また、FOGは可動部が全く存在せず、完全な静止型ジャイロであることから、無擾乱、高信頼、長寿命といった長所を備えています。
このような特長から、各種ジャイロの中でも広汎な用途に用いることができ、航空機、船舶、潜水艇、車両などの移動体や土木・建設分野など、様々なシーンで使用されています。

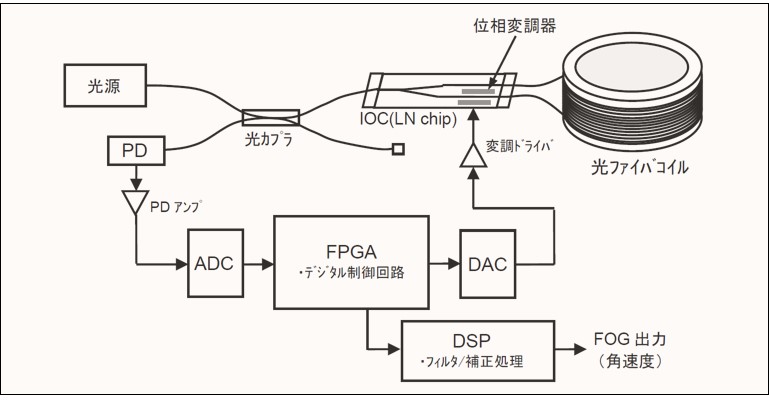
FOGのブロック図
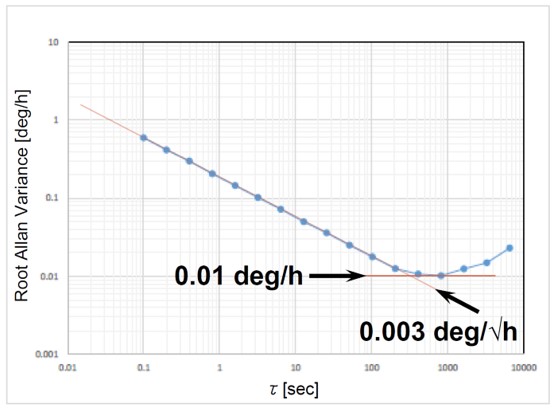
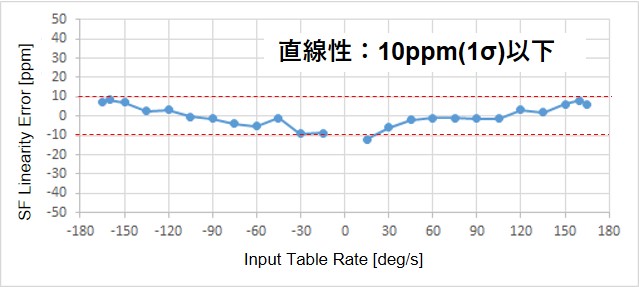
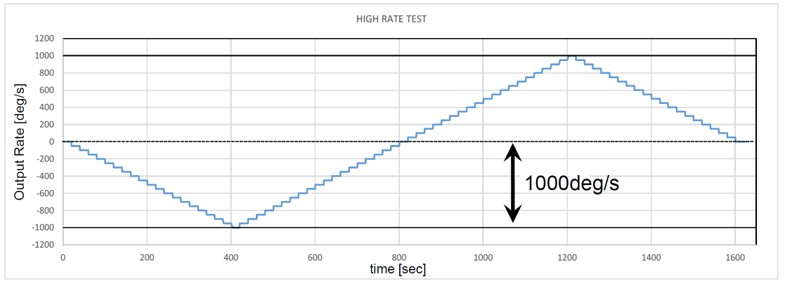
FOG計測性能 評価例(アラン分散評価、スケールファクタ直線性評価、計測レンジ評価)
※ 画像クリックで拡大表示をご覧いただけます。
慣性航法装置への応用
当社は、ジャイロセンサや加速度センサの技術に加え、ソフトウェアを用いた姿勢・航法計算の技術を開発しており、慣性センサの計測データを全地球測位衛星システム(GNSS)の測位データとの比較によって補正し高精度な航法データを得る慣性航法装置(INS/GNSS)を製品化しました。ストラップダウン方式の姿勢計算や航法計算では、慣性センサの計測データをそのまま用いた場合、各センサのデータが誤差を有したまま積分されることにより、計算結果の誤差が増大していく傾向があります。
INS/GNSSでは、時間的に飛び飛びで誤差を有してはいるものの真値の周りに分布する特長があるGNSS測位結果と、時間的に連続性のある慣性センサのデータを用いた航法計算結果とを比較して、各センサの出力や各物理量の誤差を推定し、最も確からしい推定値に補正を行うことのできる複合航法演算が用いられます。
カルマンフィルタと呼ばれる誤差推定アルゴリズムによって慣性センサとGNSSのそれぞれの長所を活かしてハイブリッドすることにより、姿勢・方位、速度、位置、それぞれにおいて誤差の増大傾向がない最適化された航法データを得ることができるのです。
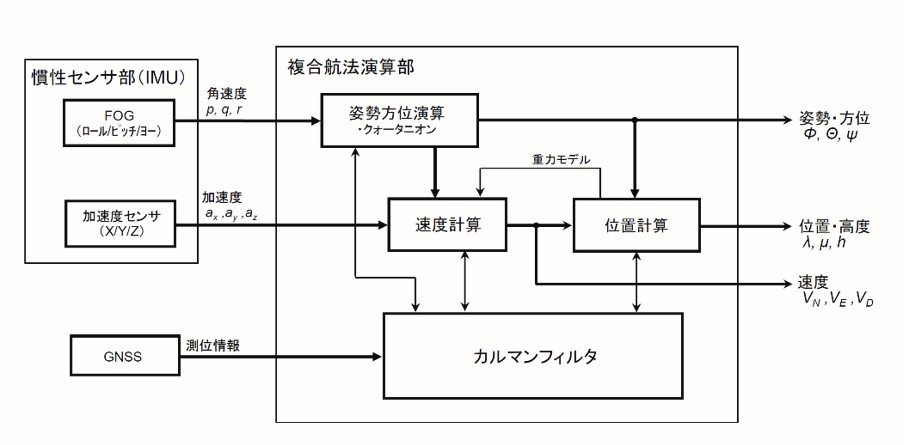
FOG慣性航法装置(INS/GNSS)ブロック図
慣性航法とGNSS測位を複合したINS/GNSS概念図
航空機でのフライト試験や自動車での走行試験などフィールドテストを繰り返すことにより、INS/GNSSが実際に使用される環境条件に合わせた機器の動作確認や計測性能を評価・検証しています。
東京航空計器のINS/GNSSは、角速度センサに小型のFOGを使用しているFOG慣性航法装置(FOG-INS/GNSS)です。FOGの特長によって、角速度、加速度、姿勢・方位、速度、位置を高精度に計測することができるコンパクトで汎用性の高い計測装置となっています。
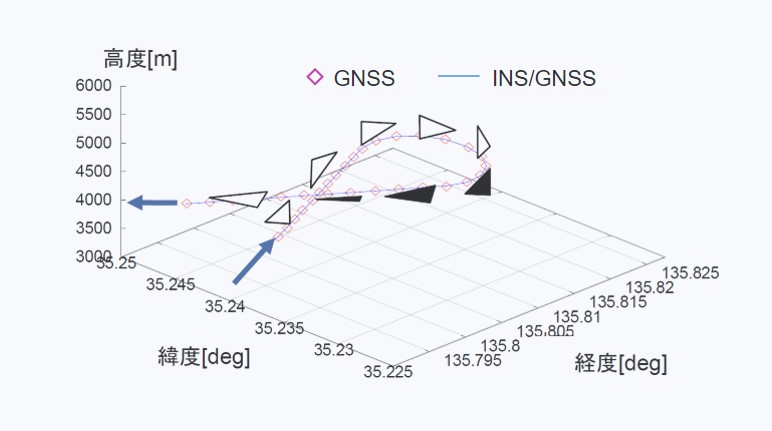
評価試験として、宇宙航空開発機構(JAXA)の所有する実験用航空機Mupal-αにFOG-INS/GNSSを搭載し、リング・レーザ・ジャイロを用いた高精度な慣性航法装置(MSAS-GAIA)を比較対象として各航法データの評価を行ないました。結果、比較対象と概ね一致する高い計測精度が得られることを確認しています。
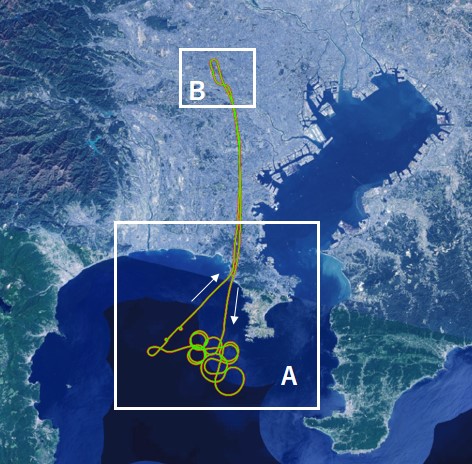


Mupal-αの飛行経路、および
相模湾上空の領域Aと調布飛行場付近の領域B
当社製FOG-INS/GNSSの航法データが緑、
比較対象のMSAS-GAIAが赤。
※ 画像クリックで拡大表示をご覧いただけます。
(地図データ出典:国土地理院 全国最新シームレス空中写真地図の一部を引用)
FOG慣性航法装置
(FOG-INS/GNSS)基本仕様:
| 計測範囲 | 3軸 角速度:±180 deg/s 3軸 加速度:±98 m/s2 (±10G) |
|---|---|
| 姿勢角(ロール、ピッチ)誤差 | 0.1 deg (rms) |
| 方位角(ヨー)ドリフト | 1.0 deg/h ( 0.0003 deg/s ) (rms) |
| 速度 | 0.1 m/s (rms) |
| 位置 | 3.0 m (rms) |
| 供給電源 | ±15V , +5V |
| 出力形態 | デジタル出力(RS-422) |
| 寸法 | 幅144 mm × 奥行144 mm × 高さ80 mm |
| 質量 | 1.8kg |
| 使用温度範囲 | -20℃~+60℃ |
FOG-INS/GNSS